作為實現高等級自動駕駛場景化應用的技術主線,車路協同(V2X)預警感知技術既是加強路側基礎設施對車端賦能的“管道”,也是推動“聰明的車”與“智慧的路”深度融合的關鍵支撐性技術。目前緊趨多源數據融合發展方向,聚焦純視覺協同感知技術優化、激光雷達點云處理技術升級、多傳感器時空信息匹配與數據融合技術以及車路協同感知技術標準體系構建等領域精準發力。
盡管從技術和產業發展的成熟度來看,網聯深度支撐車路協同(V2X)仍然面臨著技術融合、基礎設施建設、以及商業運營模式等方面的困難和挑戰,亟需圍繞網聯深度協同、路側基礎設施構建、數據互通壁壘破除、配套政策法規完善等方面全局把握、深耕細作,持續解決車路協同(V2X)技術全面推廣應用面臨的“感知不充分”和“規則不明確”兩大核心問題,推動相關產業由示范應用快速迭代,最終向商業化運營成功轉化。
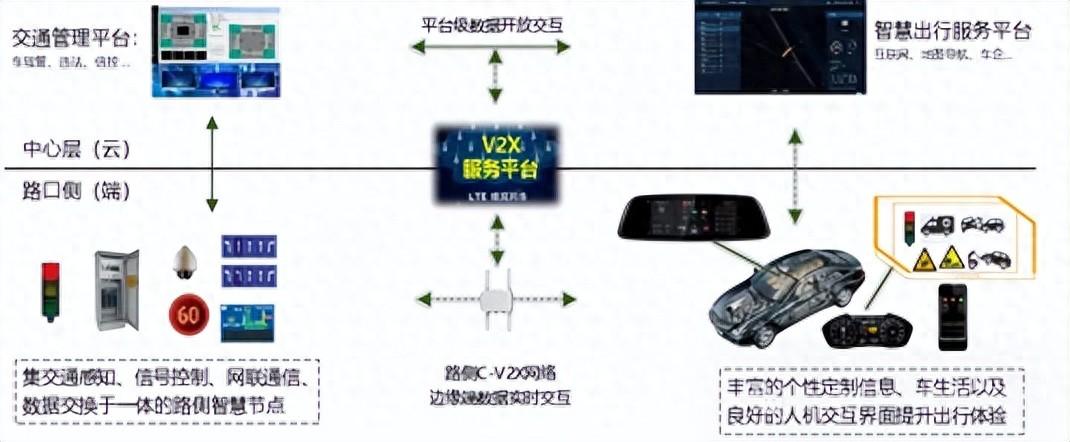
圖1 公安交管視角車路協同技術架構
視覺傳感器成本較低,基于交通領域的先驗知識和經驗,用具有身份判別度的特征進行描述,如圖像中目標的邊緣信息、色彩信息、車型和配飾等,以及更具有識別性的車身貼圖、備胎、車內裝飾、車身上的刮擦痕跡等外觀信息。通過諸如空間信息(形狀、大小、距離)、運動信息(速度、時間)和語義信息(顏色、類型、車牌)等較為豐富的環境語義信息描述,分析視覺傳感器捕獲的圖像特征,借以執行如道路目標檢測跟蹤、語義分割、障礙監測、場景識別、車道檢測、道路裂縫檢測等多模式復雜任務。車路協同預警感知技術的實現有賴于視覺傳感器兼具高清分辨率和泛在動態檢測范圍,確保在各種環境下均能捕捉到清晰完整的車輛運行環境信息。

圖2 車路協同預警信息語義表達
作為功能完善、適用性廣、實用性高、可靠性強的智能化產品,為華智能哨兵預警系統能夠有效感知車輛行駛及路面運行狀態并著重解決超速超限、路口視距不良、惡劣天氣影響、信息提示不及時不顯著、事故及誘導信息發布途徑不完善發布不及時等問題,通過交通誘導屏將過往車輛以及路面情況進行信息發布,以便警示駕駛員:減速慢行,謹慎駕駛,同時提醒行人:注意安全,遵守交通法規,從而實現智能交通設施之間以及智能交通設施與車輛及其他交通參與者之間的信息實時高效共享。同時,為路網交通狀態分析及交通管控措施優化提供數據參考,保證道路安全、高效通行,提高系統運行效率。
基于激光脈沖往返時間的測量計算車輛與物體之間的距離,激光雷達在車路協同感知應用中發揮著重要作用。由于其激光束散度較低,可以減少距離對于功率的衰減,陽光直射條件下測量距離可達200 m;可采用旋轉鏡改變激光脈沖方向,實現360度全覆蓋,最終生成激光雷達點云數據。

圖3 為華預警系統激光雷達感知應用
激光雷達點云特征提取包括數據預處理、目標特征提取、目標分類三個過程。數據預處理涵蓋點云降采樣、坐標轉換、點云濾波等流程。目標特征提取主要包括點云區域分割和特征提取兩個步驟,區域分割階段主要完成點云聚類,明確特征模式分類(如直線、圓弧等),并確定隸屬該特征模式的區域及區域內的激光數據點集,以提取待分類目標;在特征提取階段,主要選擇多維特征對點云點數、距離、數據強度等進行提取,完成各特征參數的確定、特征點的提取以及特征值的計算。目標分類是將從點云數據中提取出的特征準確地歸類為特定的目標類別的關鍵過程,這些類別可以包括車輛、行人、自行車、交通標志等交通對象。

圖4 激光檢測實際場景應用
毫米波雷達具有天線波束窄、分辨率高、頻帶寬、抗干擾能力強等特點,精度可達到毫米級,檢測過程中通過發射毫米級波束,實現對物體的快速定位。與激光雷達、攝像機等光學設備相比,毫米波雷達在惡劣天氣下的性能表現更好、成本較低、易于大規模生產,目前已廣泛應用于車載終端及路側預警設備。
毫米波雷達感知技術與激光雷達感知技術都涉及點云數據的信號處理、目標檢測等關鍵步驟,但各自的工作原理與特性存在一定區別,致使感知實施過程存在顯著差異。毫米波雷達更多地利用電磁散射特性進行信號處理與目標檢測,而激光雷達則主要依賴3D坐標信息與反射強度進行數據解讀,實現運動畸變糾正。在數據密集度方面,毫米波雷達點云數據比激光雷達點云數據更為稀疏和分散,導致數據處理算法需要更加高效和簡潔。

圖5 高速合流匝道雷達預警檢測技術應用
高速合流匝道雷達預警檢測技術應用控制邏輯:當支路車輛行至高速匯入口,距離支路哨兵80~100米處,此時,當高速主路有車駛近匯入點【1號哨兵檢測到車輛接近匯入點,自動無線發送數據給2號哨兵】,2號支路哨兵會向支路車輛發出紅色警示信息:“左側來車,注意避讓”并啟動紅藍爆閃燈,同時對匝道合流車輛進行測速警示。
當匝道合流行至高速匯入口,距離設備80~100米處,此時,當高速主路無車駛近匯入點,2號支路哨兵會向匝道合流發出綠色提示信息:“靠右行駛,注意觀察”并啟動紅藍爆閃燈,同時對行駛車輛進行速度提示。
多傳感器融合感知通過有機組合不同來源傳感器的信息片段,彌補了單一來源傳感器感知方法的缺陷,提升了前端交通感知性能。隨著道路智能化等級的提升,更多高精度的傳感器將逐步布設于路側基礎設施,逐步降低對自動駕駛車輛本身硬件的要求,形成了車路多傳感器融合發展態勢。新興的多傳感器融合技術在車路協同自動駕駛和其他領域中正發揮著越來越重要的作用,如激光雷達與紅外數據融合、紅外與視頻數據融合、激光雷達與視頻數據融合等模式,數據融合將逐漸成為目標跟蹤、交通障礙物檢測、交通狀態估計、異常檢測與行為預測等前沿領域應用趨勢。





發布日期: 2023-07-04

發布日期: 2024-06-17

發布日期: 2024-07-03

發布日期: 2024-04-23
發布日期: 2024-05-17
發布日期: 2023-07-04

發布日期: 2024-01-06

發布日期: 2024-08-21
發布日期: 2025-04-24
發布日期: 2025-04-24
發布日期: 2025-04-24
發布日期: 2025-04-24
發布日期: 2025-04-24
尋找更多銷售、技術和解決方案的信息?
廣州綠測電子科技有限公司(簡稱:綠測科技)成立于2015年11月,是一家專注于耕耘測試與測量行業的技術開發公司。綠測科技以“工程師的測試管家”的理念向廣大客戶提供專業的管家服務。綠測科技的研發部及工廠設立于廣州番禺區,隨著公司業務的發展,先后在廣西南寧、深圳、廣州南沙、香港等地設立了機構。綠測科技經過深耕測試與測量領域多年,組建了一支經驗豐富的團隊,可為廣大客戶提供品質過硬的產品及測試技術服務等支持。




技術工程師

020-22042442
 GtestWorks自動化測試平臺
GtestWorks自動化測試平臺 GNSSWorks車載衛星定位系統自動化測試系統
GNSSWorks車載衛星定位系統自動化測試系統 ShieldingWorks屏蔽效能測試系統
ShieldingWorks屏蔽效能測試系統 Vectworks汽車電子部件測試系統
Vectworks汽車電子部件測試系統 VNAWorks無源器件測試系統
VNAWorks無源器件測試系統 WirelessWorks無線通信測試系統
WirelessWorks無線通信測試系統 COMWorks串行總線測試系統
COMWorks串行總線測試系統 DAQWorks高速數據采集系統
DAQWorks高速數據采集系統 FCTWorks電路板性能測試系統
FCTWorks電路板性能測試系統 新能源與電動汽車
新能源與電動汽車
 電磁兼容性EMC
電磁兼容性EMC
 半導體與器件
半導體與器件
 中試平臺建設方案
中試平臺建設方案
 新一代信息技術與智能網聯
新一代信息技術與智能網聯
 高端醫療裝備
高端醫療裝備
 自動化測試
自動化測試
 高速串行接口測試
高速串行接口測試
 低空經濟
低空經濟